Математичні моделі багатоланкових маніпуляторів
Навчальний заклад: Ліцей № 45 Львівської міської ради з поглибленим вивченням англійської мови
Автор: Яблонський Олександр Юрійович
Відділення: Математика
Секція: Прикладна математика
Область: Львівська
Опис:
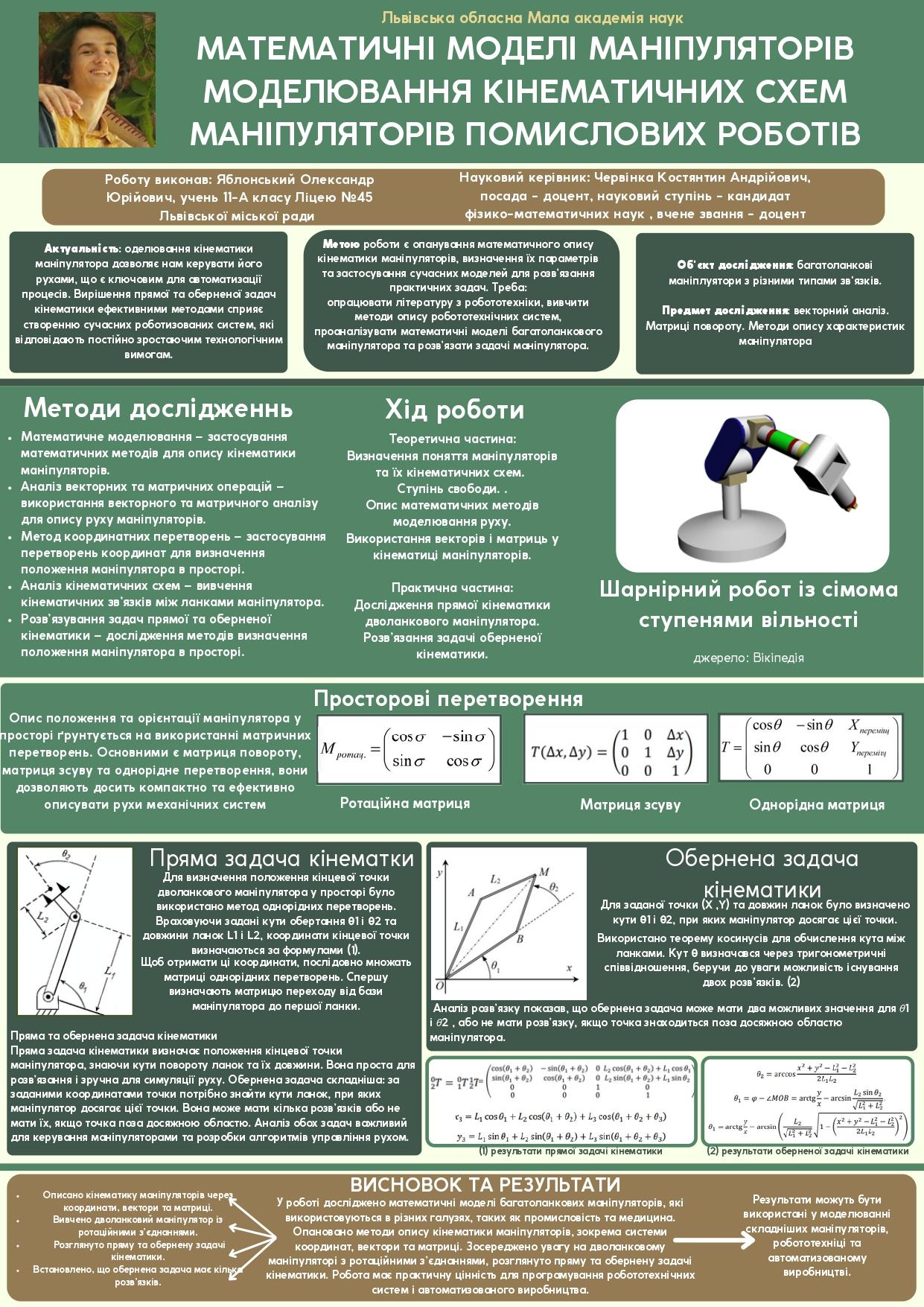
У цій роботі досліджуються математичні моделі багатоланкових маніпуляторів – важливих елементів сучасних робототехнічних систем. Розглянуто методи опису кінематики, зокрема використання координатних систем, векторів і матриць. Особливу увагу приділено дволанковому маніпулятору з ротаційними з’єднаннями. Розв’язано пряму та обернену задачі кінематики: визначено положення кінцевої точки маніпулятора та знайдено параметри, за яких він досягає заданої точки. Встановлено, що обернена задача може мати кілька розв’язків або не мати їх зовсім у певних випадках. Також створено Python-програми для обчислень і візуалізації. Отримані результати можуть бути використані для моделювання складніших маніпуляторів у тривимірному просторі.