Розробка роботизованої колісної платформи
Навчальний заклад: Волинський науковий ліцей Волинської обласної ради
Автор: Вовк Данило Сергійович
Відділення: Інформаційні технології
Секція: Комп’ютерна інженерія
Область: Волинська
Опис:
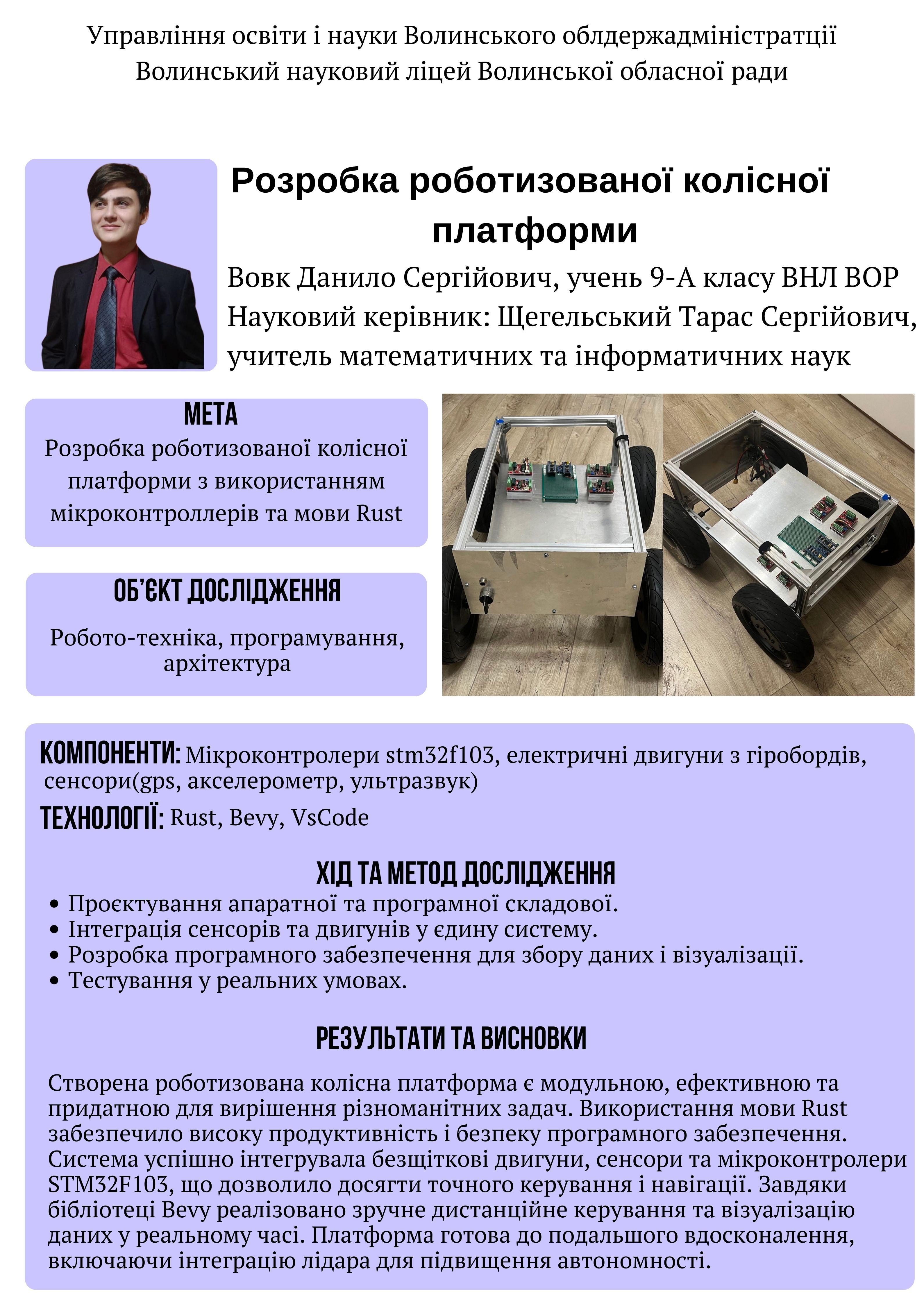
Розроблено роботизовану колісну платформу, призначену для виконання широкого спектра завдань: від навчальних і наукових до прикладних у гуманітарній, промисловій та дослідницькій сферах. Платформа базується на мікроконтролері STM32F103 та використовує безщіткові двигуни з контролерами від гіробордів, що забезпечує економічність та ефективність. Сенсорна система включає GPS, акселерометри, компас та ультразвукові дальноміри для автономної навігації. Програмне забезпечення написано на мові Rust з використанням бібліотеки Bevy для візуалізації та керування. Модульна конструкція дозволяє легко адаптувати платформу до різних завдань, а також передбачає можливість інтеграції лідара. Результати дослідження підтверджують високу практичну цінність платформи для автоматизації доставки вантажів, моніторингу небезпечних зон та інших задач. Платформа демонструє ефективність запропонованих рішень і має значний потенціал для подальшого розвитку.