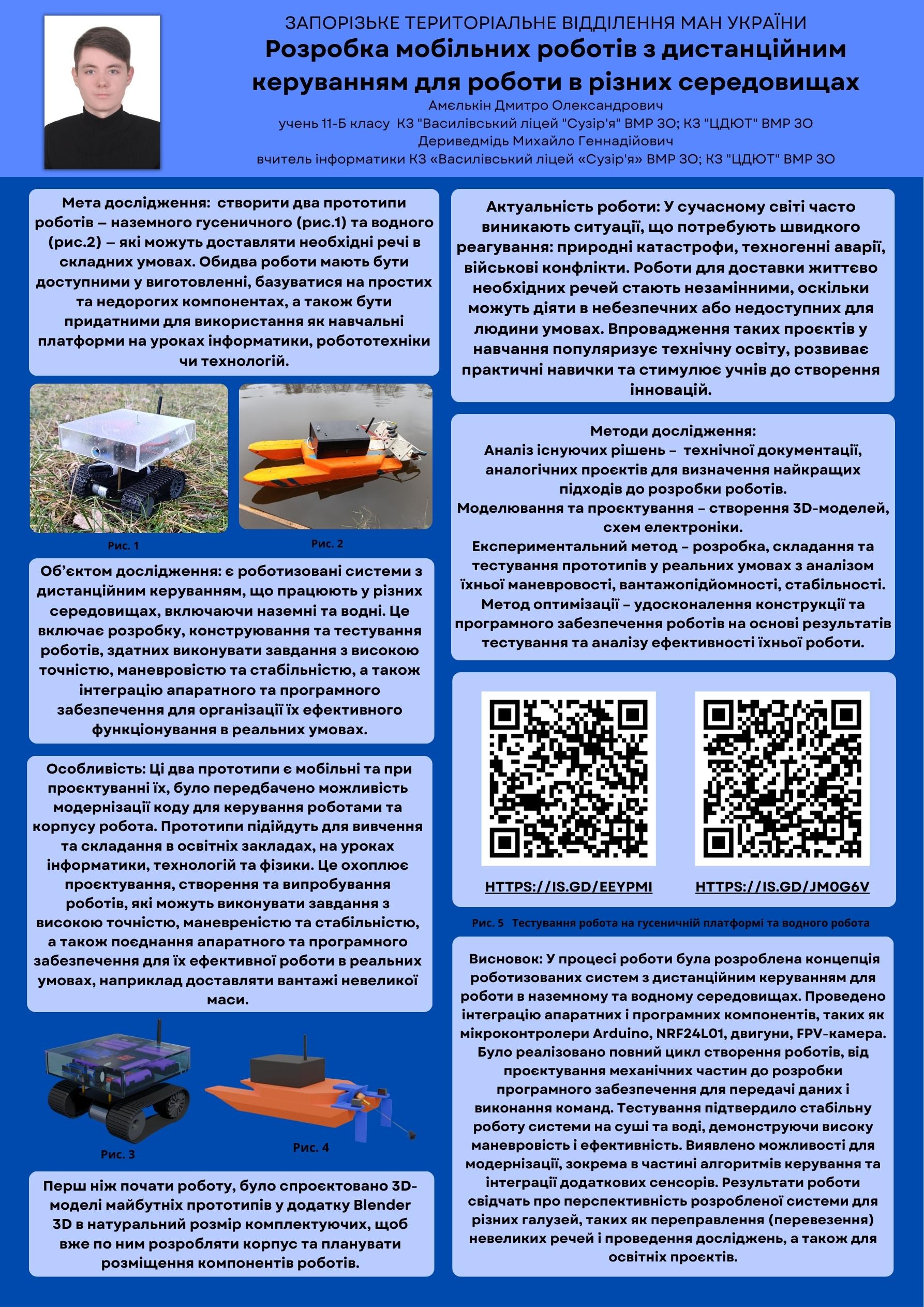
Розробка мобільних роботів з дистанційним керуванням для роботи в різних середовищах
Навчальний заклад: Комунальний заклад «Василівський ліцей «Сузір'я» Василівської міської ради Запорізької області
Автор: Амєлькін Дмитро Олександрович
Відділення: Інженерія та матеріалознавство
Секція: Прикладна механіка та машинобудування
Область: Запорізька
Опис:
Проєкт передбачає розробку двох роботизованих платформ – наземного робота на гусеничній платформі та водного робота з катамаранною конструкцією. Основною метою є створення дистанційно керованих роботів, здатних працювати у складних умовах. Наземний робот має гусеничний привід для підвищеної прохідності, алюмінієву раму і корпус з оргскла для зменшення ваги та модульну конструкцію, що дозволяє легко замінювати компоненти. Він керується за допомогою бездротового зв’язку NRF24L01 та програмного забезпечення на основі Arduino. Автономна робота сягає двох годин. Тестування показало його стійкість на різних поверхнях і високу автономність. Водний робот побудований за принципом катамарана, що забезпечує стабільність на воді. Він оснащений безколекторним двигуном, рульовими сервомеханізмами та герметичним відсіком для електроніки. Автономна робота сягає близько двох годин, залежить від напрямку течії. Тестування підтвердило його маневровість і точність управління. Проєкт демонструє ефективність використання бездротових модулів для керування роботами, їхню адаптацію до реальних умов і можливість подальшого вдосконалення. Отримані результати можуть бути застосовані для освітніх цілей у вигляді наборів для практичних робіт на уроках робототехніки, інформатики, а також у сферах доставки, досліджень або надзвичайних ситуацій.