Біоінспірований робототехнічний маніпулятор з адаптивним керуванням зусиллям захвату та швидкістю переміщення
Навчальний заклад: Перша міська гімназія Черкаської міської ради Черкаської області
Автор: Подакіна Вероніка Максимівна
Відділення: Інженерія та матеріалознавство
Секція: Автоматизація та робототехніка
Область: Черкаська
Опис:
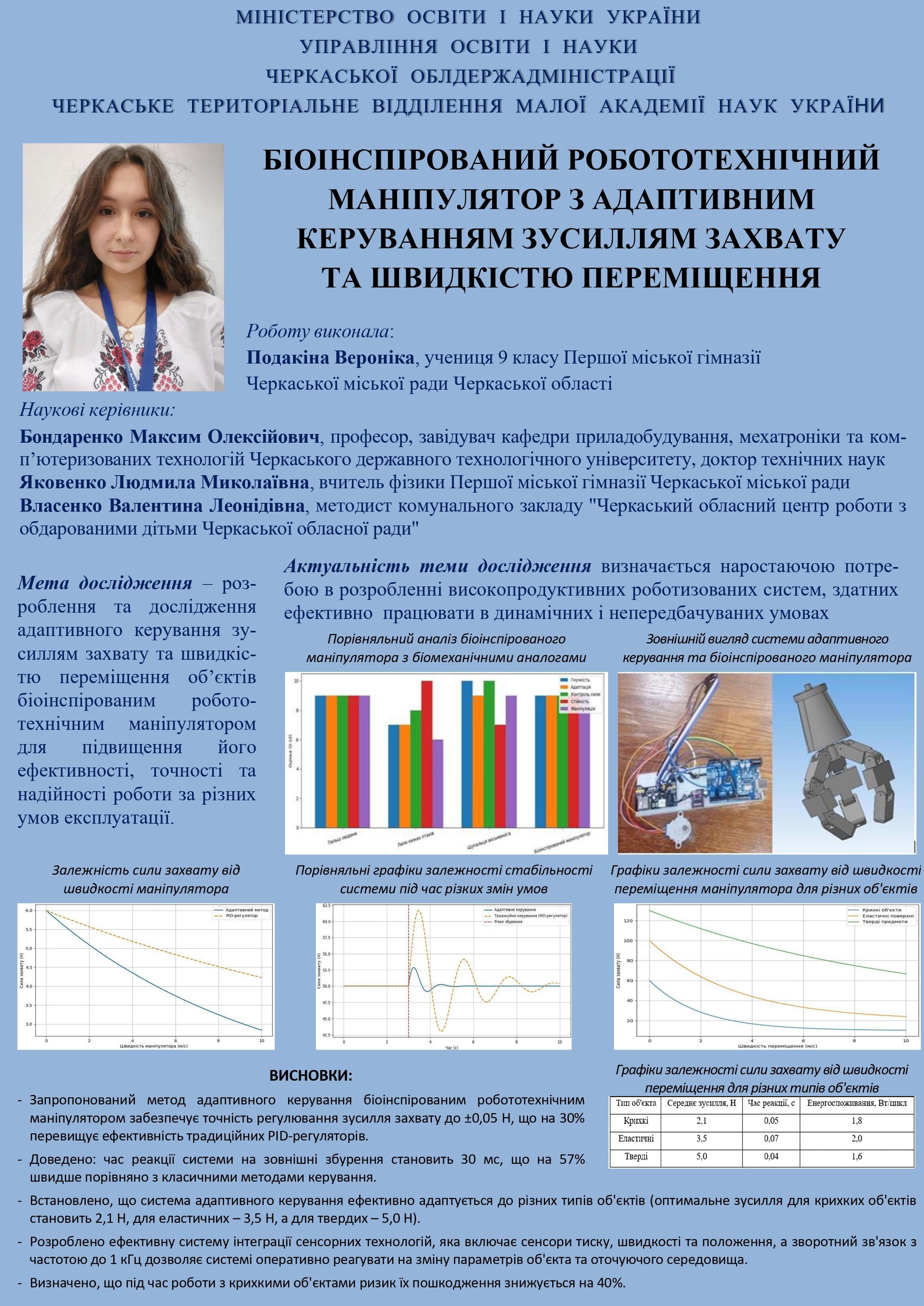
Актуальність мого дослідження полягає в наростаючій потребі світу у багатофункціональних та адаптивних робототехнічних маніпуляторах. За мету було встановлено завдання розробити метод адаптивного керування зусиллям захвату та швидкістю переміщення об'єктами для біоінспірованого маніпулятора за допомогою застосування датчиків доторку. У ході наукової роботи проведено всебічний аналіз методів адаптивного керування біоінспірованим робототехнічним маніпулятором, включаючи математичне моделювання, числову симуляцію та експериментальне тестування, що дозволило розробити ефективний підхід до оптимізації зусилля захвату та швидкості переміщення об'єктів у динамічних умовах. Визначено, що метод адаптивного керування має значний потенціал для впровадження у промислові, медичні та автоматизовані складські системи. Під час роботи з крихкими об'єктами ризик їх пошкодження знижується на 40%. Також такий маніпулятор можна застосовувати в різних сферах нашого життя, оскільки він адаптується під предмет та поверхню, який переносить.