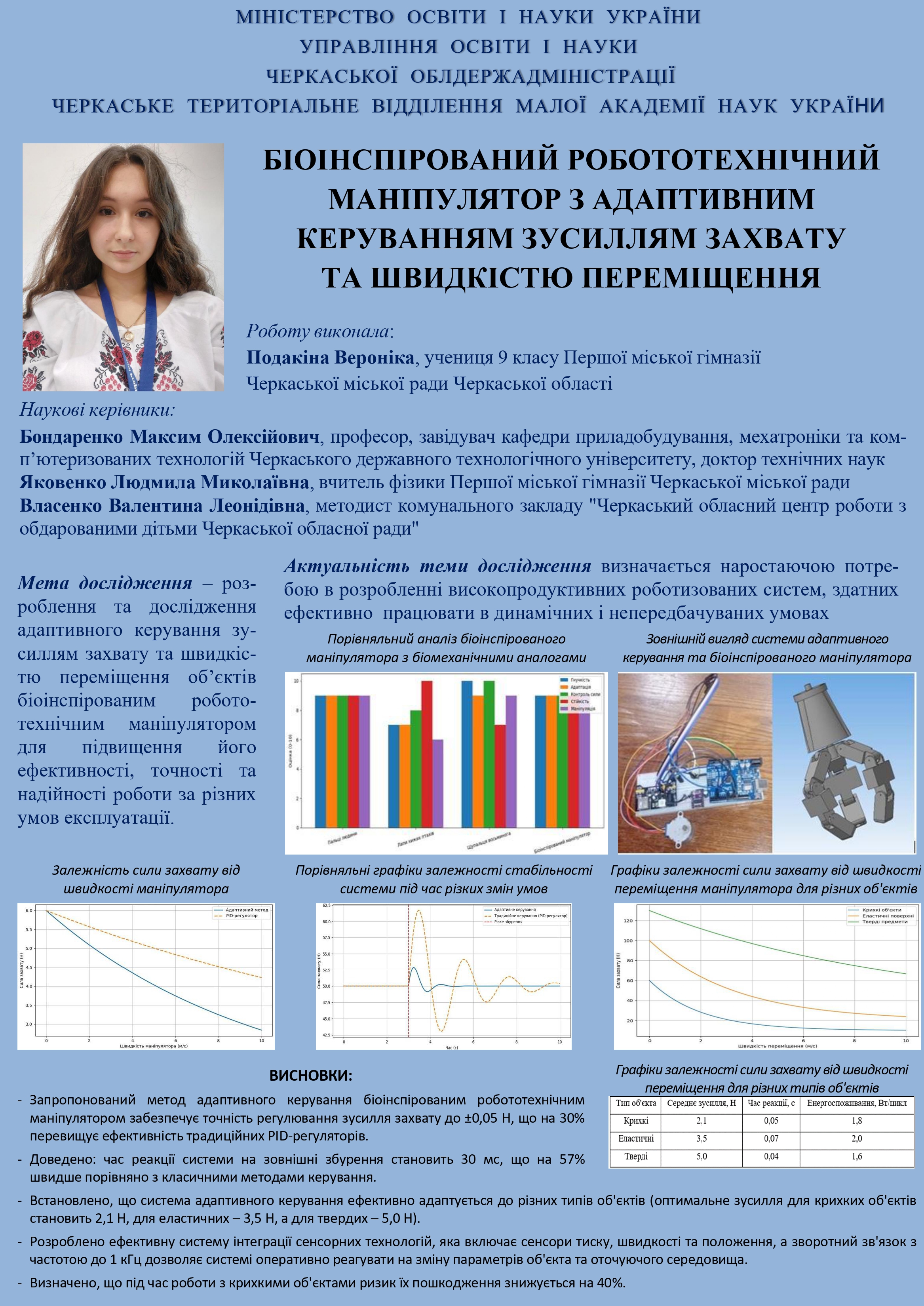
Біоінспірований робототехнічний маніпулятор з адаптивним керуванням зусиллям захвату та швидкістю переміщення
Навчальний заклад: Перша міська гімназія Черкаської міської ради Черкаської області
Автор: Подакіна Вероніка Максимівна
Номінація: Прикладні інженерні технології (Старша вікова категорія)
Область:
Опис:
Сучасні технології автоматизації та робототехніки активно розвиваються, відкриваючи нові можливості для інтеграції біоінспірованих рішень у промислові та побутові маніпуляційні системи. Біоінспіровані робототехнічні маніпулятори, що імітують рухи та принципи функціонування біологічних організмів, мають значний потенціал для виконання складних і високоточних завдань, таких як делікатне захоплення та ефективне переміщення об'єктів різної форми та текстури. Проте, існуючі методи керування маніпуляторами часто не забезпечують достатньої гнучкості та адаптивності в умовах невизначеності або при змінних характеристиках об'єктів. Це вимагає розроблення вдосконаленого підходу до адаптивного керування зусиллям захвату та швидкістю переміщення, що дозволить підвищити точність і ефективність виконання маніпуляційних операцій.У ході наукової роботи проведено всебічний аналіз методів адаптивного керування біоінспірованим робототехнічним маніпулятором, включаючи математичне моделювання, числову симуляцію та експериментальне тестування, що дозволило розробити ефективний підхід до оптимізації зусилля захвату та швидкості переміщення об'єктів у динамічних умовах.Визначено, що метод адаптивного керування має значний потенціал для впровадження у промислові, медичні та автоматизовані складські системи. Під час роботи з крихкими об'єктами ризик їх пошкодження знижується на 40%.