Маніпулятор із зворотнім зв’язком
Навчальний заклад: Навчально - виховний комплекс “Школа комп’ютерних технологій - Львівський технологічний ліцей”
Автор: Тузяк Анна Олегівна
Номінація: Прикладні інженерні технології (Молодша вікова категорія)
Область:
Опис:
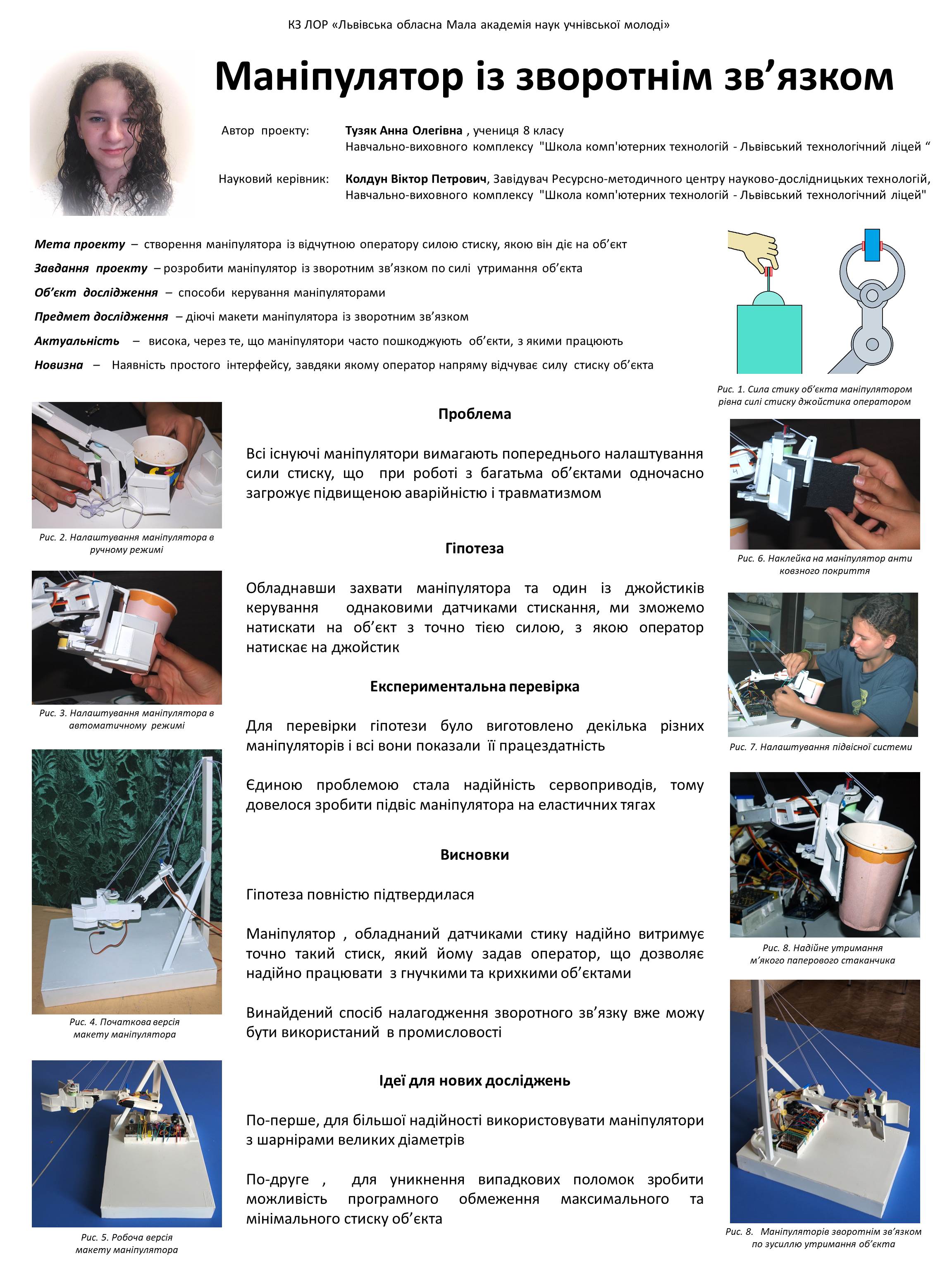
Великою проблемою всіх роботизованих маніпуляторів є відсутність оперативного зворотного зв'язку між ними і оператором. Наприклад коли людина особисто піднімає велику коробку, то по першій же спробі підйому він може оцінити її вагу і відповідно інерційність, щоб в подальшому це враховувати в кожному своєму русі. Коли ж людина піднімає ту саму коробку за допомогою маніпулятора вона має якимось чином наперед дізнатися хоча б її вагу - інакше вона має всі шанси цю коробку або роздушити надмірним стисканням, або розбити об підлогу при недостатньому стисканні. У випадку роботи на конвейєрі ця проблема доволі швидко вирішується попереднім налаштуванням маніпулятора і подальшою роботою з більш-менш однаковими предметами. Коли ж предмети весь час різні, то завжди є загроза не розрахувати силу стиску. Особливо актуальним це є при роботі з вибухонебезпечними предметами. Робот сапер як і просто сапер може помилитися лише один раз. І якщо роботів-саперів ще можна виготовляти буквально на конвейєрі, то літаки, автомобілі, будинки все ще мають надто велику цінність, щоб ними ризикувати. Не кажучи вже про людські життя. Для вирішення проблеми була висунута наступна гіпотеза - обладнавши захвати маніпулятора та один із джойстиків керування однаковими датчиками стискання, ми зможемо натискати на об’єкт з точно тією силою, з якою оператор натискає на джойстик. Для більшої надійності можна буде програмно обмежувати ступінь стиску. Для перевірки гіпотези було виготовлено декілька різних маніпуляторів і всі вони показали її працездатність. Особливо при роботі з предметами, які мають обмежену міцність стінок як, наприклад, паперові стаканчики чи невеликі коробки. Експерименти показали, що Гіпотеза повністю підтвердилася. Маніпулятор , обладнаний датчиками стиску надійно витримує точно такий стиск, який йому задав оператор, що дозволяє надійно працювати з гнучкими та крихкими об’єктами. Винайдений спосіб налагодження зворотного зв’язку вже можу бути використаний в промисловості. Особливо корисним такий маніпулятор буде в інженерних військах та спецпідрозділах поліції, які займаються розмінуванням.